The plot thickens....
I have been digging deeper into the ins and outs of the Toyota EPAS system. One thing that I ran across is that the Toyota systems have a "torque sensor zero point calibration" that must be performed in case of a wheel re-alignment or if the motor assembly is replaced. This is described well here (toward the bottom of the page):
https://www.autoserviceprofessional.com/article/92544/Electronic-power-steering?Page=3As far as I have seen, nobody has talked about this when installing the Toyota gear into older vehicles. This seems like a very important procedure and the fact that nobody is doing it, leads me to believe that it is partially (if not fully) to blame for the lack of centering that I (and others) are experiencing with the system.
Another thing that I found out, and this is a bit confusing, is that apparently, the Yaris ECU doesn't actually go into full speed assist mode unless it sees an RPM signal come across the CAN bus. This is confusing to me because I swear that my system does change the level of assist based on speed, but I have no concrete way to verify this, except for how it "feels" to drive. This has also been tested by others on the bench (Kevin) by connecting a square wave generator to the Yaris ECU speed input (pin 5) and reporting variability in assist level based on altering the pulsing frequency.
The information found here is invaluable (post #23):
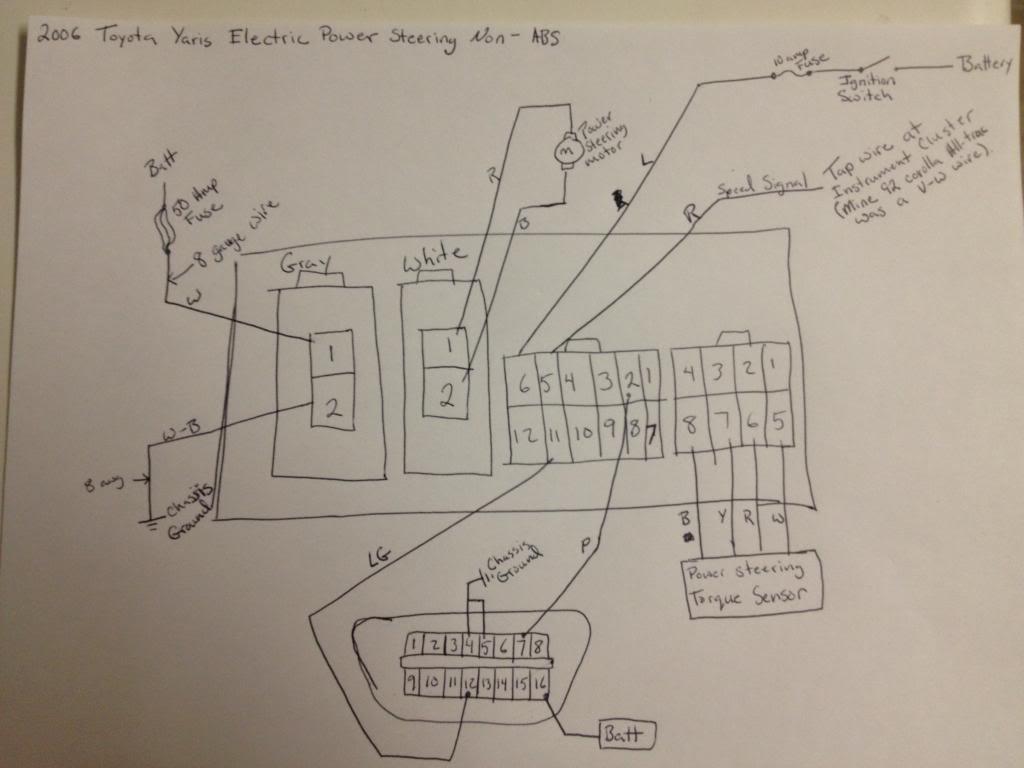
http://www.toymods.org.au/forums/threads/79652-Electric-power-steering/page2I have been in email contact with the original poster (his name is Jared) of that thread. Here is a more complete pin-out for the Yaris steering ECU:
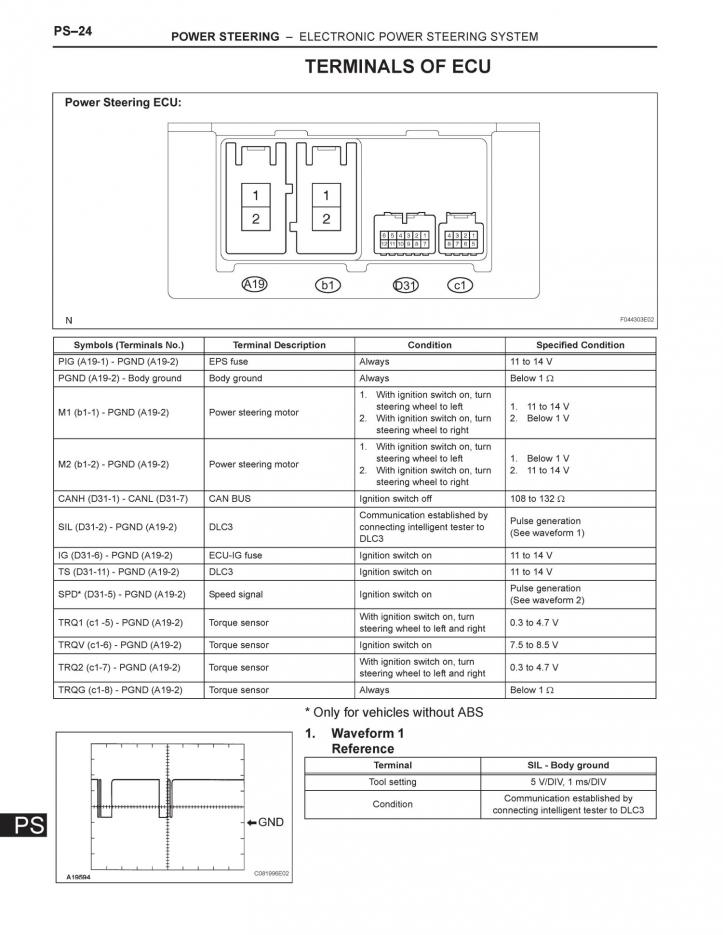
This is a wiring diagram that Jared put together.
Jared solved the CAN signal issue by using and custom programming the CANdo Auto Module:
http://www.cananalyser.co.uk/candoauto.htmlHere is an excerpt from his post on the Toyota forum:
"I going to jump into technical which will make much more sense once you research the CAN system. I was able to find the hex decimal code for engine RPM is 2C4 wheel speed is either 0B0 or 0B2. Since my setup has a non ABS eps ecu has an analog wheel speed signal (input). I only needed the engine RPM on the CAN network so i will only go over how I programed the Cando for this. The Cando has 2 analog inputs that can be programed to then transmit programable CAN data. It also can have ten static data points programed and continually repeated. When you get the software open there are four tabs. "Input view", "Input setup", "CAN transmit" and "CAN setup" first off we need to go to "CAN setup" and change the setting to 500kps to match the network speed of the CAN system. Then back to the tab "CAN transmit". Now as I said earlier the hex for RPM is 2C4. The data length is 11 bit. The dlc is 8. The information I used was ramdomly picked after much trial and error. Almost 3 pages of codes I tried. I could set the RPM in connect my scan tool and see the RPM but still no assist. After much frustration I finally realised that it was a setting I had wrong. It was how often I had it repetting the message. The end result looked something like this 2C4 8 06 8A 00 19 00 00 92 09 Repeat rate 20 ms(milliseconds). All this done and turned the car on and immediate assist. I still have not been able to drive the car and see if it feels bettter. Still working on some idle issues with the engine. I could however tell the assist was greater. Last thing to work on is connecting the CAN wiring to the DLC so i can see about changing the setting for the assist level at idle."What makes this more frustrating for me is that the Holley Dominator does use CAN communication. This is used for communication with Racepak and the Holley digital displays. The frustrating part is that the Holley CAN protocol is proprietary, so the odds of the Yaris steering computer "understanding" the Holley data packets are nil.
Before I go down the same path as Jared, I need to have a conversation with DCE. Their Microsteer ECU is speed sensitive. The only question remains is if the
Microsteer ECU is compatible with the Toyota motor. If it is compatible, then I am inclined to ditch the Toyota ECU and simplify this ordeal by spending money on the Microsteer ECU instead of buying the CANdo box. I also need to find out how DCE handles the torque sensor center point calibration, as this seems rather important for obtaining satisfactory on-center feel and return.
I am open to thoughts and suggestions!!!